
早稲田大学 知覚情報システム・メディアインテリジェンス研究室
- English
- 日本語
SCHEMA
SCHEMA
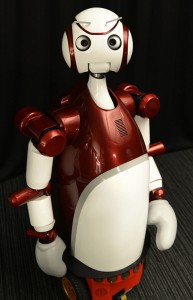
Design of SCHEMA
SCHEMA(シェーマ)は、会話ロボットとしての親和的な外見も加味しながら、座位の会話相手の目線に合わせて身長はおよそ120cmとし、人間との会話の物理的なプロトコルを合わせるための必要条件の検討の結果、自由度を合計22に設定しました。
Related Publications
Yoichi Matsuyama, Kosuke Hosoya, Hikaru Taniyama, Hiroki Tsuboi, Shinya Fujie and Tetsunori Kobayashi, “SCHEMA: multi-party interaction-oriented humanoid robot.” In ACM SIGGRAPH ASIA 2009 Art Gallery & Emerging Technologies: Adaptation, pp. 82-82. ACM, 2009.
Four-Participant Facilitation Model
人同士のコミュニケーションの場にファシリテータとして介在し、コミュニケーションをより活性化させる会話ロボットシステムを提案しています。
会話分析や音声対話システムの研究分野においては長らく1対1の2者間対話が対象とされていましたが、我々の日常の会話は2者の対話だけでなく多人数で行われることも多くあります。このような多人数会話ではより複雑な情報授受が行われます。すべての発話は各参加者間の共同行為であり、現発話者の発話や受け手の態度によって会話グループの境界や次話者候補などが相互に了解されるような参与の構造を持ち、次話者の選択すら常に自明とは限りません。さらに、参加者の立場ごとに状況理解は少しずつ異なるのが一般的であり、ファシリテータはそのような重層的な構造を客観的に理解しながら状況を調整する必要があります。本研究では、このような性質をもった多人数会話にロボットを一参加者として参加させるための基礎的枠組みを検討することに加えて、ファシリテータとしてその場をより適切に調整するための戦略について検討しています。会話参加者が均等に発言機会を与えられているような状態を目標とし、発言機会が極端に少ない「置いてけぼり」状態の参加者が検出されたときに、既に進行している会話の場を壊さずに段階的に主導権を奪取し、目標が達せられた際には直ちに場に主導権を戻せるような手続きのモデル化を試みています。
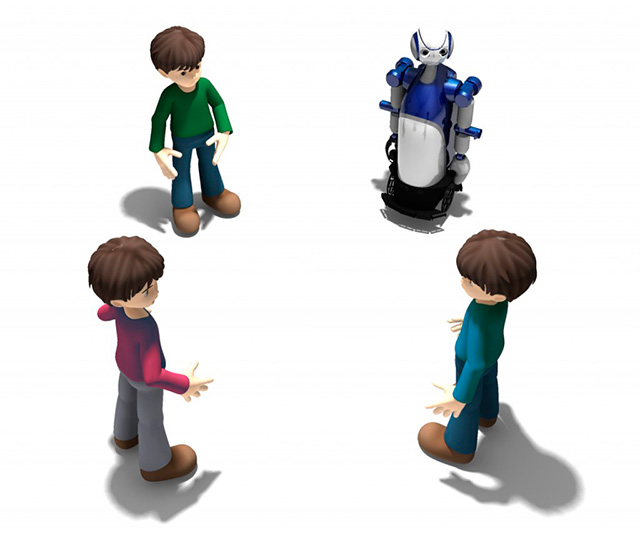
従来の多くの対話システムは、1対1の2者間で発話権の所在や文脈が互いに了解されながら会話が進行するような、質問応答や発話権交代モデルを想定しています。しかし、3者以上で行われる多人数会話では、しばしば社会的不均衡の問題が生じます。例えばあるグループを形成している3者会話においては、2者間のインタラクションが主導的でもう1人の参加者が会話にうまく参加できない「置いてけぼり」(意に反して、参与役割における「話し手」にも「受け手」にも長時間昇格できない)状態になっているような状況を考えてみます。このとき、「置いてけぼり」状態の参加者は本来自分の考えを発言したいにも関わらず何らかの原因によってその機会をうまく与えられていないような状況に陥っている可能性があります。さらに、このような不均衡の問題は、多人数会話の参与役割理解の重層性という特性上、会話を主導的に進めている参加者側からは了解されていない場合もあり、自然には解決しない可能性があります。このような社会的不均衡を解決するためには、その状況を客観的に観察し調整する役割を担う第4番目の参加者を考える必要があります。
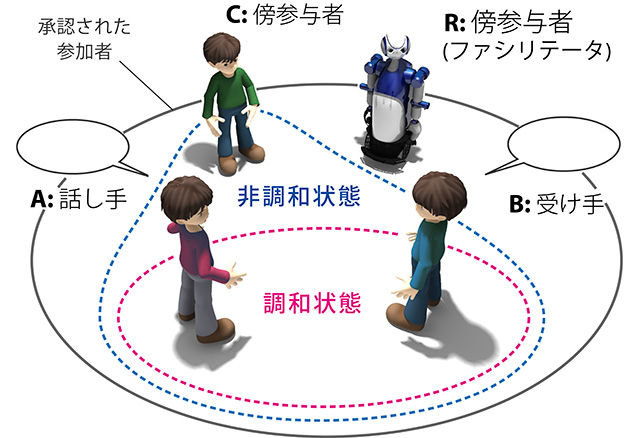
会話の物理的なプロトコル(身体性)を共有できる会話ロボットは、その第4番目の参加者の役割を担える可能性を有しています。しかし、ロボットが場の調整に乗り出そうとするときにはそれ相応の手続きが必要になります。社会的不均衡状態が検出された時点で即刻、不利益を被っている対象者に直接行動に出てしまうと、会話の場を破壊してしまう可能性があるからです。会話の場を乱すことなく調整をするためには、その場で主導的に会話を進めている参加者らの状況も考慮しつつ、場を調整するための主導権を要求すべく行為し、明示的あるいは暗黙的にそれが承認された後に改めてしかるべき対象者に発話機会を与える、といったような多段の手続きを踏む必要があります。よって、ファシリテーションモデルを扱うための最小単位である4者会話を対象として、ロボットの会話状況の調整手続きについて検討しています。この手続きのモデル化には、誤りを含むセンサ情報にロバストな部分観測マルコフ決定過程(POMDP)を用いています。場を調整するための手続きの効果と手続き開始のタイミングについて、被験者実験の結果も合わせて報告ました。また、ユーザシミュレータを用いてPOMDPとMDPの性能比較の結果についても報告しました。
Related Publications
Yoichi Matsuyama, Iwao Akiba,Shinya Fujie and Tetsunori Kobayashi, Four-Participant Group Conversation: A Facilitation Robot Controlling Engagement Density As the Fourth Participant, Journal of Computer Speech and Language, 2014. (DOI:10.1016/j.csl.2014.12.001)
Projects
OTHER SITES

© 2015 Perceptual Computing Group, Waseda University. All Rights Reserved